Proposed Framework
Risk Propagation & Augmented Sampling
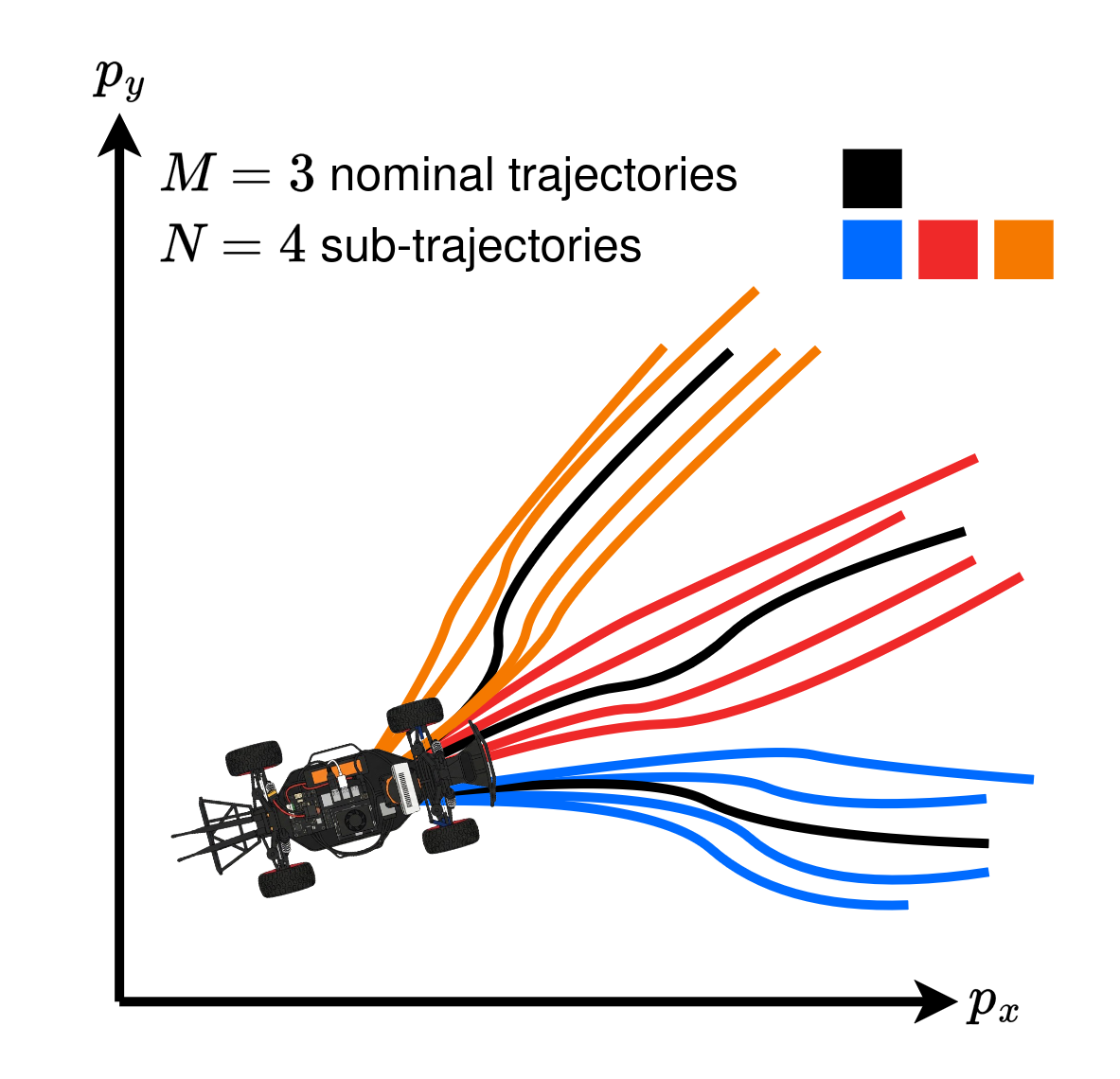
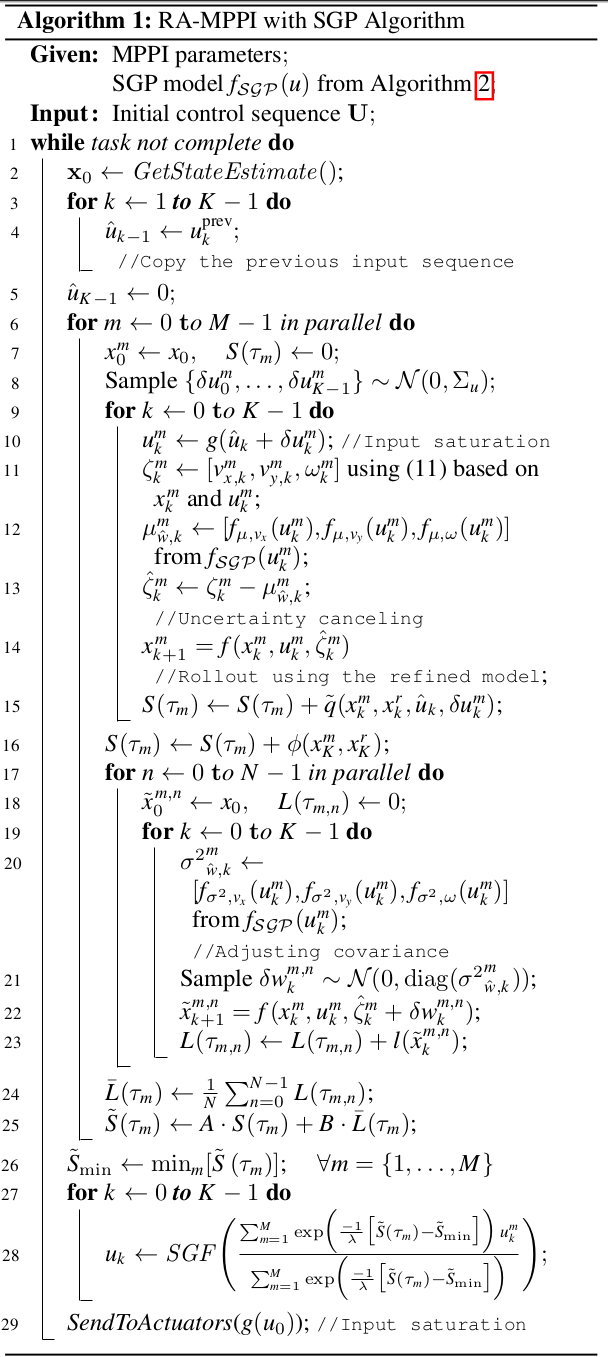
To evaluate risk directly in the state space, an augmented sampling strategy is employed. Each of the M nominal control sequences is expanded into N stochastic sub-trajectories. These sub-trajectories are propagated using local velocity disturbances scaled by the SGP's predictive variance, allowing the controller to "foresee" potential collisions caused by unmodeled dynamics.
Online State Uncertainty Learning
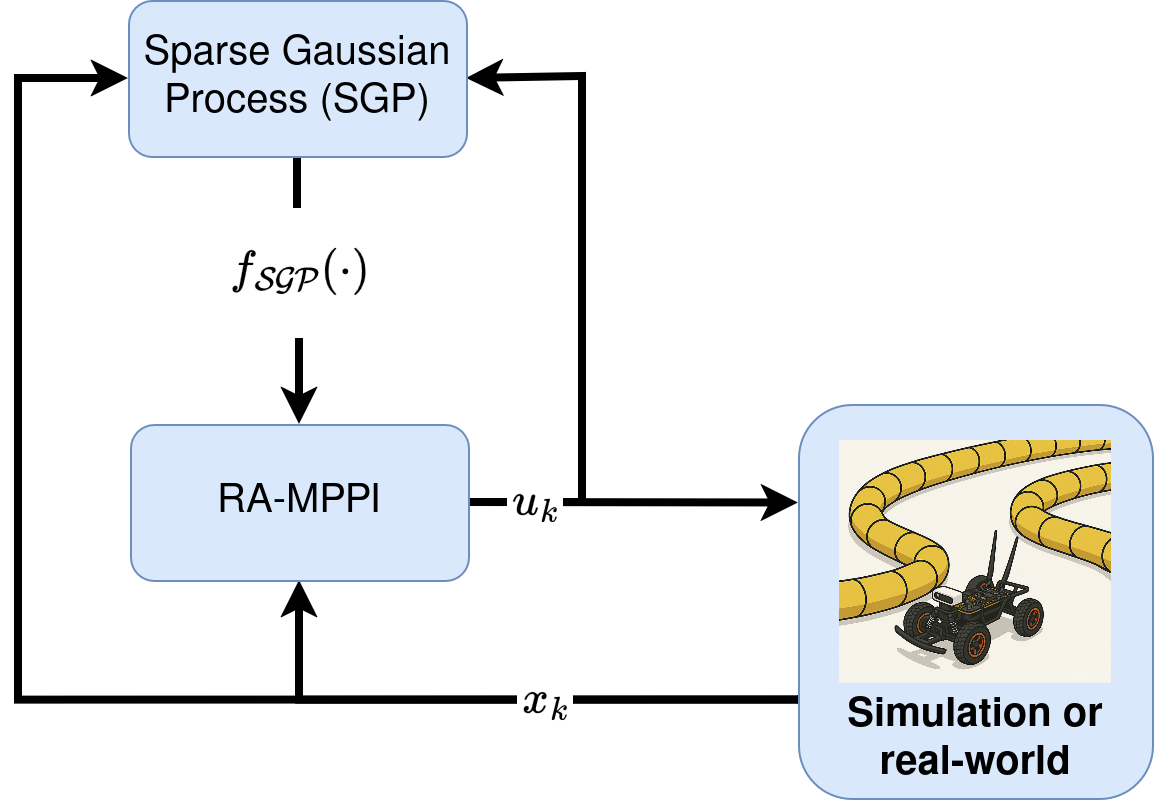
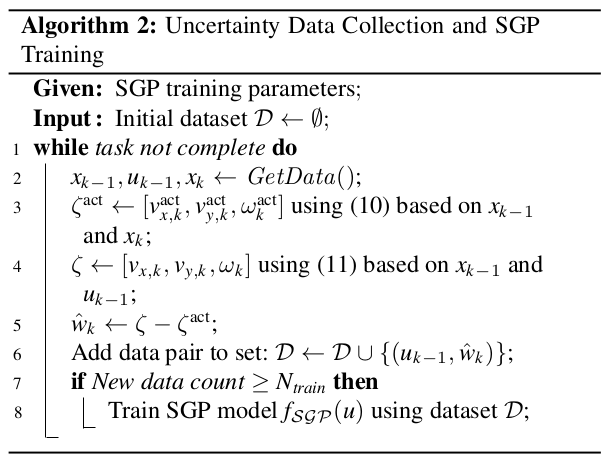
A data-driven Sparse Gaussian Process (SGP) efficiently models the mean and variance of state-transition errors during operation. The SGP's predictive mean is utilized to dynamically correct the nominal prediction model, while its predictive variance scales the disturbance covariance to evaluate risk across stochastic sub-trajectories.